Smart Load Management for EV Chargers: Integrating Local Control with OCPP

Introduction
As electric vehicle (EV) charging infrastructure rapidly expands, one of the most critical design factors for EV chargers is load management.
For example, suppose a site has ten 11kW AC slow chargers installed, but the contracted site power capacity is only 50kW. What happens if all the chargers operate at full capacity at once? The total power consumption will exceed the contracted capacity, triggering main circuit breaker trips, power facility failures, and degradation of power quality. Charging interruptions will also cause significant inconvenience to users.
Conversely, if the limited contracted power can be efficiently distributed among the chargers, idle power can be minimized, wait times can be reduced, and throughput per charger can be increased. This improves both operational efficiency and user satisfaction. It is a key strategy for maintaining service quality and increasing business profitability without blindly expanding power infrastructure.
To respond to such situations, effective load management is essential. In other words, it requires mechanisms to dynamically allocate and adjust the power delivered to each charger to control the total site load.
Typical questions to consider for load management include:
- Which charger (vehicle) should be prioritized?
- If vehicles are added or removed during charging, how should the power be reallocated?
- How should load be adjusted in response to external signals such as Demand Response (DR) events?
To address these questions, we need an integrated control structure that combines local charger, central management systems (CSMS), and external DR event systems.
In this article, we introduce a basic structure that enables real-time, priority-based load management using local charger control in combination with OCPP Smart Charging, based on a scenario involving 10 slow chargers sharing a 50kW power contract.
NoteDynamic load management allows charger power to be adjusted in real time based on system load conditions, but from the user's perspective, it may result in lower-than-expected charging speeds and longer charging times. Therefore, practical deployments must include user experience considerations such as displaying expected charge speed/time before charging begins, pre-authorization or consent for dynamic load adjustments, and consistency with time-based pricing models.
Local Load Control Models and Structural Limitations
Several types of local load balancing approaches are already in use at EV charger installation sites. These can be categorized based on the control entity and communication structure:
- Static distribution with fixed power limits
- Each charger is configured with a fixed maximum power value. This is simple to install and does not require communication, making it suitable for unreliable network environments or simple facilities.
- However, power cannot be automatically redistributed when chargers are idle, resulting in low energy efficiency.
- Centralized control via local controller (Site Controller / Edge Proxy)
- A small on-site controller or edge server manages the entire group's power distribution from a single point. It acts as a site gateway or mini-CSMS, responsible for real-time measurement and allocation. While this offers flexible installation and simplifies charger logic, it introduces additional hardware and potential failure points.
- Master-slave structure between chargers (Master-in-EVSE)
- One charger assumes the master role and directly communicates with other chargers to coordinate power. While the structure is simple, the master becomes a single point of failure and upper-layer integration is limited.
- Mesh topology-based distributed control
- Chargers communicate peer-to-peer to share states and constraints and make decentralized decisions using local algorithms. While highly scalable, maintaining synchronization, consensus, and conflict avoidance introduces significant design complexity.
- Current sensor-based distributed control
- CT (Current Transformer) sensors on the power input line allow the charger or a local controller to monitor real-time current and impose limits. This offers fast response without requiring communication, but cannot consider charger states or user priorities.
While these approaches may work in limited scenarios, they have structural limitations for coordinated power distribution:
- Limited integration with central systems (OCPP, DR)
- Most systems operate with proprietary protocols and cannot easily interface with OCPP or DR signals.
- Lack of user-aware power reallocation
- User state-based policies (e.g. SoC, departure time, charging reservations) are hard to apply, and dynamic power reallocation for joining/leaving vehicles is limited.
- Inability to respond to DR or contract power changes in real-time
- Without a real-time control path, systems cannot promptly adapt to market signals or emergency curtailment requests.
Overcoming these limitations requires a structure that integrates real-time responsiveness in charger firmware, policy control in CSMS, and forecasting/adjustment from DR systems.
Proposed Method – Integrated Control with Local Firmware + OCPP
We propose a structure where each charger contains its own load management logic, integrated with the OCPP Smart Charging function. The structure is designed as follows:
- Real-time control is handled at the charger (local firmware).
- Policy-based control is handled at the CSMS.
- External events (e.g. DR) are reflected at the policy level via OCPP Smart Charging.
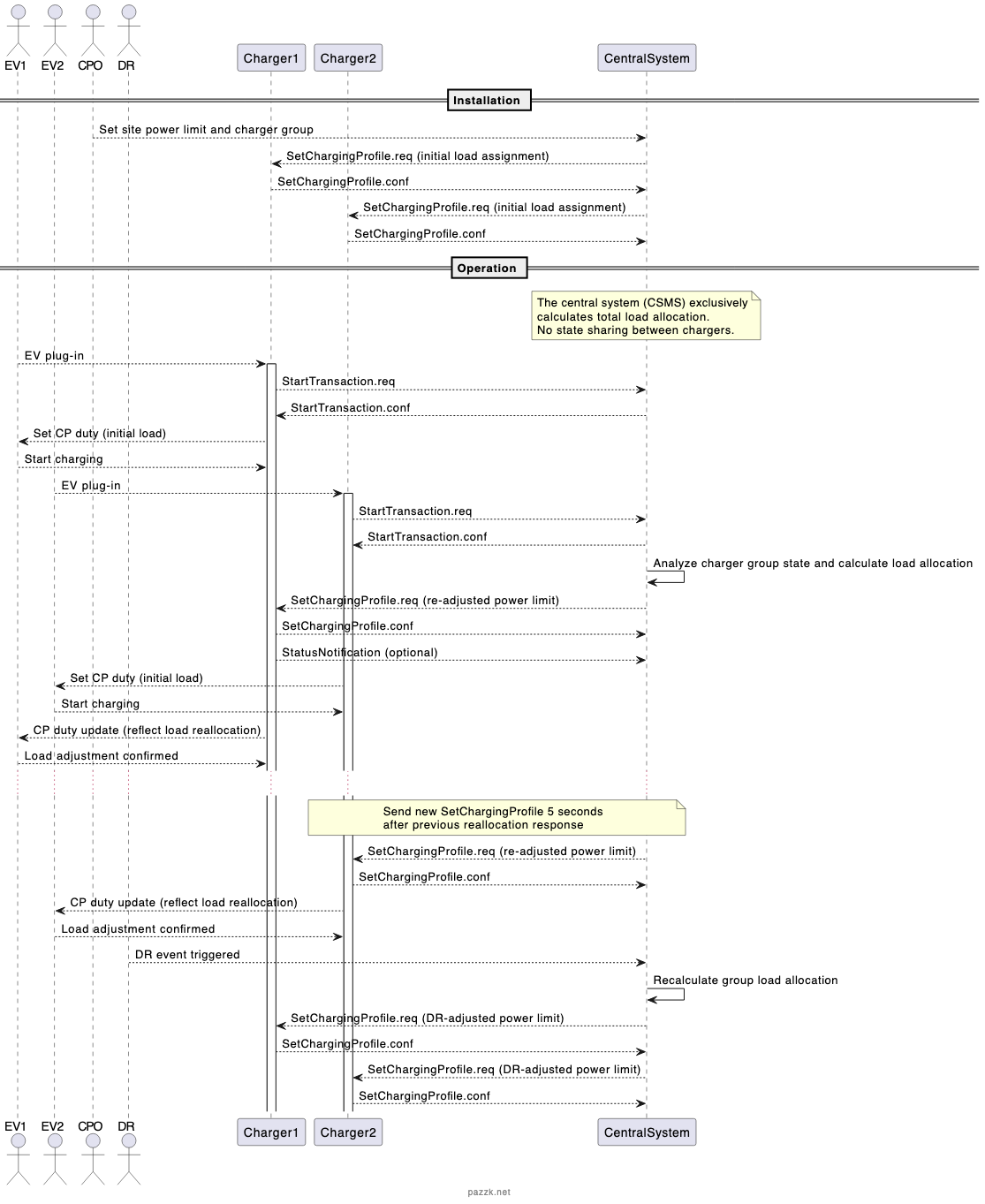
In this structure, chargers do not communicate directly with each other or share states. Each charger operates independently, and only the CSMS knows the group status (charging vs idle).
Based on the available contract power, connected charger count, and charger
states, the CSMS calculates each charger’s load and sends it using
SetChargingProfile.
Scenario Assumptions
- Contracted power: 50kW
- Number of chargers: Ten 11kW AC slow chargers
- Allocation logic: Even split (1/n)
- Control protocol: OCPP 1.6 Smart Charging
- Power reflection time: EV must adapt to CP PWM duty changes within 5 seconds (per IEC 61851-1)
Control Delay Issue
Although the CSMS can allocate loads across the group, it can take up to 5 seconds for a charger’s assigned power to be reflected in the vehicle. If this delay is not considered, actual consumption may temporarily exceed the 50kW limit, potentially triggering a main breaker trip or load protection system.
NoteAccording to IEC 61851, the EV must respond to CP PWM duty changes within 5 seconds.
Response Strategies
Method 1: Delay SetChargingProfile response
- After receiving a profile from the CSMS, the charger:
- Adjusts power → Measures current → Confirms adjustment → Sends response
- This is safe but introduces cumulative delays with many chargers.
- For 10 chargers, sequential control may take up to 50 seconds.
Method 2: Reserve pre-charge power
- Reserve a portion of the contracted power (e.g. 10%)
- Use this reserve (e.g. 5kW) to begin charging immediately upon a new request
- This is normally reserved as headroom and used only in stable conditions
- Reallocate loads for existing chargers first
- After 5 seconds, assign remaining power to the new charger
Example:
- 4 chargers active at 11kW
- New charge request arrives
- Allocate 5kW to the new charger temporarily
- Reallocate 9kW each to the 4 active chargers
- Wait 5 seconds
- Assign 9kW to the new charger
This approach ensures both responsiveness and stability without waiting for replies. However, local fallback mechanisms are needed in case the charger fails to adjust as expected.
Control Flow Summary
This structure follows a 4-step decision-making loop:
- Situation awareness: Gather EV plug-in state, requested current, contract power, and DR events
- Policy application: Calculate load per 1/n, priority, or reservation-based policy
- Execution: Apply profiles via
SetChargingProfile; firmware acts accordingly - Monitoring & feedback: Check whether vehicle adapts; fallback if failed
NoteSeedeveloper documentation for more details on charger-side power control.
Scalability – Toward Priority-Based and Predictive Scheduling
For simplicity, this article uses an even-split (1/n) allocation example based on 50kW contract power. However, in real deployments, dynamic scheduling will be increasingly important, taking into account EV state, user intent, and external conditions.
Scalable load allocation should consider factors like:
- EV State of Charge (SoC) Prioritize low-SoC vehicles; once threshold reached, hand off power to next EV
- User needs and rate plans Higher priority for users with scheduled departure or time-based pricing
- Charging pattern predictions Forecast demand using time, day, and usage history; pre-allocate accordingly
- AI-informed policy Use machine learning to anticipate DR events, grid load, user early departure risk, and reallocate proactively
These capabilities allow the proposed structure to evolve from basic load distribution to an intelligent charging platform that integrates user behavior, system constraints, and external signals.
Conclusion
This structure is not a complete solution. Bidirectional negotiation (ISO 15118), predictive scheduling (AI), and fine-grained DR integration are areas to be continuously improved and expanded.
Still, the proposed architecture demonstrates a practical approach to integrating charger-side control with CSMS policy logic, even within the limitations of OCPP 1.6. It effectively addresses the complex constraints of contracted power, concurrent charger usage, user needs, and DR signals.
For field deployments requiring smart energy operation, this may be one of the most technically realistic starting points available today.