부하 관리를 위한 EV 충전기 제어와 OCPP 통합 전략

들어가는 말
전기차(EV) 충전 인프라가 빠르게 확장되면서, 충전기 설계에서 가장 먼저 고려해야 할 요소 중 하나는 부하 관리(Load Management)입니다.
예를 들어, 한 사이트에 11kW급 AC 완속 충전기 10대가 설치되어 있고, 해당 사이트의 계약전력이 50kW에 불과하다면 어떻게 해야 할까요? 충전기들이 동시에 최대 전력으로 동작할 경우, 전체 소비 전력이 계약전력을 초과하게 되어 과전류 차단기 트립, 전력 설비 고장, 전력 품질 저하 등의 문제가 발생할 수 있습니다. 충전 중단으로 인한 사용자 불편은 물론이고요.
반면, 제한된 계약전력을 충전기 간에 효율적으로 분배할 수 있다면, 유휴 전력을 최소화하고 충전 대기시간을 줄이며, 충전기당 처리량(회전률)을 높여 운영 효율과 사용자 만족도를 동시에 개선할 수 있습니다. 이는 전력 인프라를 무작정 확장하지 않고도 서비스 품질과 사업 수익성을 높일 수 있는 전략이 될 수 있습니다.
이러한 상황에 대응하기 위해 필요한 것이 바로 부하 관리입니다. 다시 말해, 충전기별 전력 할당을 동적으로 조정해 전체 사용 전력을 제어하는 메커니즘입니다.
부하 관리를 위해 고려해야 할 대표적인 질문은 다음과 같습니다:
- 어떤 충전기(차량)에 먼저 전력을 분배할 것인가?
- 충전 중 차량이 추가되거나 제거될 경우, 전력은 어떻게 재분배할 것인가?
- 수요반응(Demand Response) 이벤트가 발생했을 때, 외부 신호에 따라 전체 전력을 어떻게 조정할 것인가?
이러한 질문에 대응하려면 단순한 정적 분배 방식이 아닌, 충전기, 상위 시스템(CSMS), 그리고 외부 이벤트 시스템(DR)이 함께 협력하는 통합적 제어 구조가 필요합니다.
이 글에서는 50kW 계약전력을 가진 사이트에서 11kW급 완속 충전기 10대를 운용하는 시나리오를 통해, 충전기 로컬 제어와 OCPP 스마트 차징이 어떻게 결합되어 우선순위 기반의 실시간 부하 관리를 구현할 수 있는지, 그 기본 구조를 소개하려 합니다.
Note동적 부하 조정은 시스템 전력 수요에 따라 충전기별 부하를 실시간으로 변경할 수 있지만, 사용자 입장에서 예상보다 낮은 충전 속도와 긴 충전 시간이 발생할 수 있습니다. 따라서, 충전 시작 전 예상 충전 속도/시간에 대한 안내, 부하 조정 가능성에 대한 사전 고지 또는 동의, 시간 요금제와의 정합성 검토 등은 실무 적용에서 반드시 고려되어야 할 사용자 경험 요소입니다.
로컬 전력 제어 구조의 유형과 구조적 제약
충전기 설치 현장에서는 이미 다양한 형태의 로컬 로드밸런싱이 활용되고 있습니다. 제어 주체와 통신 구조를 기준으로 분류하면 다음과 같은 방식들이 대표적입니다:
- 고정 전력 제한 기반 Static 분산
- 각 충전기에 고정된 최대 전력값을 설정하는 방식입니다. 설치가 간단하고 통신이 필요 없기 때문에, 네트워크가 불안정한 환경이나 단순한 시설에 적합합니다.
- 그러나 유휴 충전기가 발생해도 전력이 자동 재분배되지 않기 때문에, 에너지 활용 효율이 낮습니다.
- 로컬 컨트롤러 기반 중앙 제어형 구조 (Site Controller / Edge Proxy)
- 현장에 별도의 소형 컨트롤러 혹은 엣지 서버를 설치해 전체 충전기의 전력을 단일 지점에서 관리합니다. 컨트롤러는 현장 게이트웨이 또는 mini-CSMS 역할을 하며, 실시간 측정과 분배를 담당합니다. 설치 유연성과 충전기 로직 단순화는 장점이지만, 별도 장비 도입과 장애 지점 증가가 단점입니다.
- 충전기 간 마스터-슬레이브 구조 (Master-in-EVSE)
- 충전기 중 하나가 마스터 역할을 하여 다른 단말들과 직접 통신하며 전력을 조정합니다. 구조는 단순하지만 마스터 단일 장애 지점(single point of failure)이며, 상위 시스템 연동이 제한됩니다.
- Mesh topology 기반 분산 제어
- 충전기들이 서로 직접 통신하여 상태 및 제약 정보를 공유하고, 로컬 알고리즘을 통해 분산 결정을 수행합니다. 확장성은 우수하지만, 분산 동기화, 컨센서스 유지, 충돌 방지 등 설계 복잡성이 큽니다.
- 전류 센서 기반 분산 제어
- 전력 인입선에 CT(Current Transformer)를 설치하고, 충전기 또는 로컬 컨트롤러가 실시간 전류를 측정해 전류 제한을 수행합니다. 통신 없이 동작 가능하며 반응 속도는 빠르지만, 충전기 상태나 사용자 우선순위는 반영할 수 없습니다.
위의 방식들은 제한된 조건에서는 유효하지만, 전력 분산이 유기적으로 작동해야 하는 환경에서는 다음과 같은 구조적 제약이 존재합니다:
- 상위 시스템(OCPP, DR)과의 통합이 어렵다
- 자체 프로토콜 기반 구조가 많아, OCPP 기반 상위 시스템이나 DR 이벤트 신호를 연동하기 어렵습니다.
- 전력 재분배가 어려워, 사용자 상태 기반 정책 적용이 불가능하다
- SOC, 출근 시간, 충전 예약 등 사용자 우선순위를 고려한 정책 반영이 어렵고, 차량 추가/이탈에 따른 동적 대응이 제한됩니다.
- DR 및 계약전력 변경에 대한 실시간 대응이 부족하다
- 외부 정책 신호를 실시간으로 반영할 수 있는 제어 흐름이 부족해, 전력시장 연동이나 긴급 감축 요청에 대한 즉시 반응이 어렵습니다.
이러한 한계를 극복하려면, 충전기의 실시간성, 상위 시스템(CSMS)의 정책 제어, DR 시스템의 예측·조정 기능이 유기적으로 통합된 구조가 필요합니다.
제안하는 방식 – 로컬 펌웨어 + OCPP 기반 통합 제어 설계
우리는 충전기에 로드밸런싱 로직을 내장하고, 이를 OCPP Smart Charging 기능과 연동한 방식을 제시합니다. 이 구조의 목적은 다음과 같습니다:
- 실시간 제어는 충전기에서 수행
- 정책 기반 제어는 상위 시스템(CSMS)에서 설정
- 외부 이벤트(예: DR)는 OCPP Smart Charging을 통해 정책 수준에서 반영
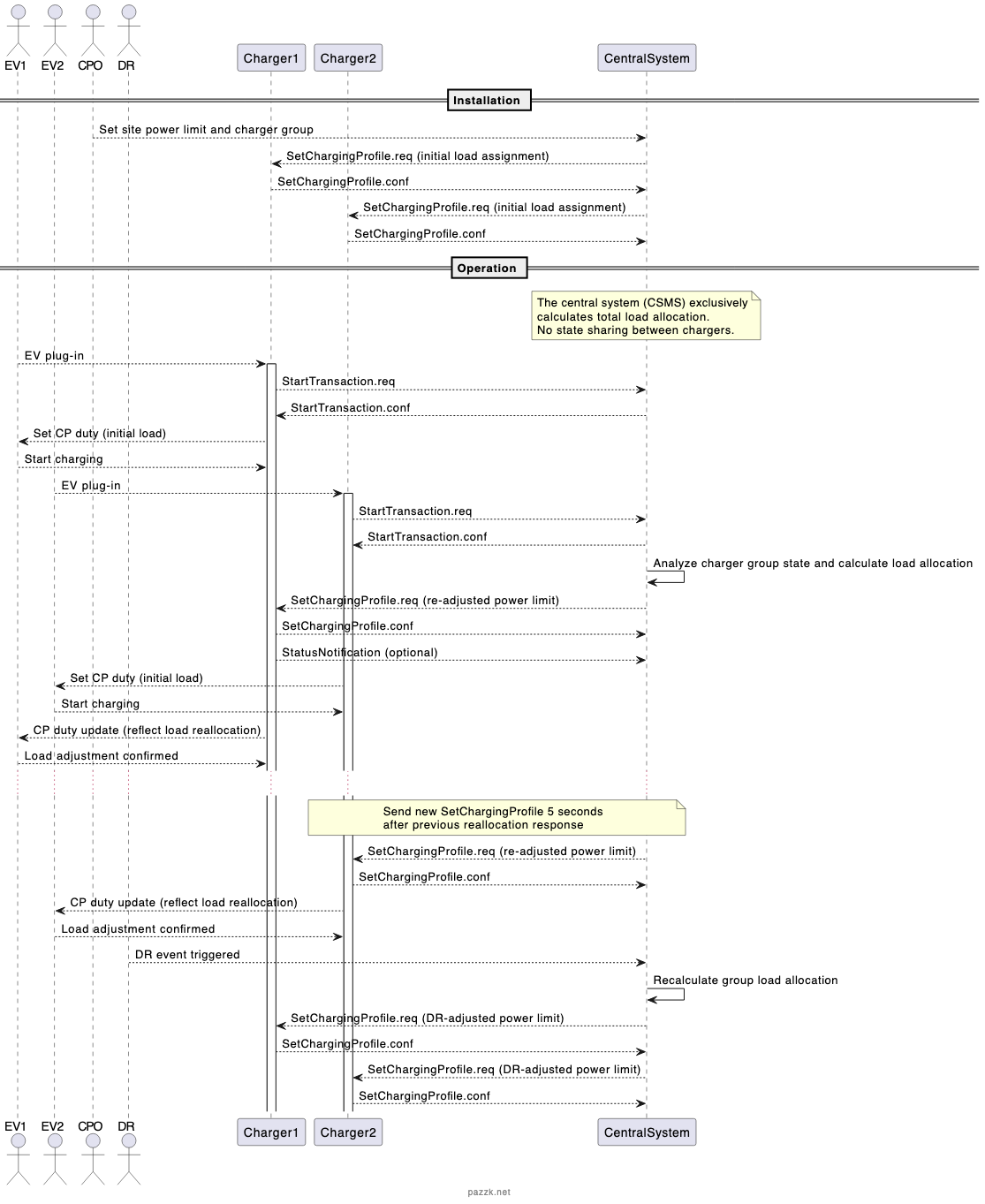
본 구조에서 충전기 간에는 어떠한 직접 통신이나 상태 공유가 없습니다. 모든 충전기는 독립적으로 동작하며, 전체 충전기 그룹의 상태(충전 중 vs 유휴)는 오직 상위 시스템(CSMS)만이 판단할 수 있습니다.
CSMS는 현재 사용 가능한 계약전력, 연결된 충전기 수, 각 충전기의 상태를 기반으로
충전기별 부하를 계산하고, SetChargingProfile을 통해 개별 충전기에 지시합니다.
시나리오 가정
- 계약전력: 50kW
- 충전기 수: 11kW AC 완속 충전기 10대
- 제어 기준: 1/n 방식 분배
- 제어 프로토콜: OCPP 1.6 Smart Charging
- 충전 전력 반영 시간: 차량은 CP PWM duty 변경 후 최대 5초 이내에 전력 조정 (IEC 61851-1 규정)
제어 지연 문제
CSMS는 그룹 내 전체 충전기의 상태를 기반으로 부하를 조정할 수 있지만, 충전기에서 설정한 전력이 차량 측에 실제 반영되기까지 최대 5초의 지연이 발생합니다. 이 지연을 고려하지 않으면, 이론상 부하는 50kW에 맞춰 조정되었더라도, 실제 소비 전력은 일시적으로 50kW를 초과하여 메인 차단기 동작 또는 부하 차단이 발생할 수 있습니다.
NoteIEC 61851 규정에 따르면, EV는 CP PWM 듀티를 통해 충전 전력을 조정할 수 있으며, 충전 중 듀티가 변경되면 EV는 5초 이내에 전력을 조정해야 합니다.
대응 전략
방법 1 – SetChargingProfile 응답 지연
- 충전기는 CSMS로부터 프로파일을 수신한 후,
- 실제 전력 조정 → 전력 측정 → 조정 완료 확인 → 응답 전송 순서로 처리합니다.
- 안전하지만, 충전기 수가 많아질수록 응답 누적 지연이 발생합니다.
- 10대를 순차 제어하면 최악의 경우 50초까지 소요될 수 있습니다.
방법 2 – Pre-charge 전력 확보
- 계약전력의 일부(예: 10%)를 별도로 확보한 후,
- 새로운 충전 요청 발생 시 즉시 해당 전력(예: 5kW)으로 충전을 시작합니다.
- 이 예비 전력은 평상시 과부하 완충 용도로 예약되어 있으며, 스케줄러가 안정 상태에서만 이를 분배에 활용합니다.
- 동시에 기존 충전기들에게 재조정된 전력을 먼저 전송하고,
- 5초 후에 새로운 충전기의 전력을 정식 할당합니다.
- 예:
- 기존 충전기 4대 × 11kW 충전 중
- → 새 충전 요청 발생
- → 일시적으로 새 충전기에 5kW 부여
- → 기존 충전기 4대에 9kW씩 재할당 후 5초 대기
- → 이후 새 충전기에 9kW 할당
이 방법은 응답 지연을 기다리지 않고도, 즉시성과 안정성을 모두 확보할 수 있습니다. 다만, 충전기는 전력 재조정에 실패한 경우 최소 충전 전력으로 폴백(fallback)하는 등의 로컬 보호 매커니즘이 필요합니다.
제어 흐름 요약
이 구조는 다음 4단계의 의사결정 흐름을 중심으로 작동합니다:
- 상황 인식: 차량 연결 상태, 요청 전류, 계약전력, DR 이벤트 등을 수집합니다.
- 정책 적용: 1/n, 우선순위, 예약 기반 분배 등 정책에 따라 전력을 계산합니다.
- 계획 실행:
SetChargingProfile을 통해 충전기별 충전 전력을 설정하고, 로컬 펌웨어가 실행합니다. - 반영 모니터링 및 피드백: 차량 반영 여부를 확인하고 실패 시 fallback 또는 재조정 로직을 실행합니다.
Note충전기의 전력 조정 상세 내용은개발자 문서에서 확인할 수 있습니다.
확장 가능성 – 우선순위 기반 및 예측 스케줄링 구조로의 확장
이 글에서는 설명의 편의를 위해, 계약전력(50kW)을 충전기 수에 따라 1/n으로 고정 분배하는 예시를 들었습니다. 하지만 실무 현장에서는 고정 분배보다는 차량 상태, 사용자 요구, 외부 조건에 따라 동적으로 스케줄링하는 구조가 점점 더 중요해질 것입니다.
예를 들어 다음과 같은 요소를 고려할 수 있습니다:
- 차량의 SoC (State of Charge)
- SOC가 낮은 차량을 우선 충전하거나, 일정 임계치까지 도달하면 다음 차량으로 전력을 넘기는 구조
- 사용자 요구 및 요금제 기반 우선순위
- 사용자가 시간대별 요금제 또는 예약시간에 따라 더 높은 우선순위를 부여받는 경우
- 충전 패턴 예측 기반 스케줄링
- 시간대, 요일, 사용자 행동 데이터를 기반으로 다음 충전 요청 수요를 예측하고, 이를 기반으로 현재 충전기 상태를 사전 조정
- AI 기반 정책 반영
- 예측 모델을 통해 DR 이벤트 발생 가능성, 배전망 부하 상태, 사용자 충전 이탈 확률 등을 학습해 선제적으로 전력을 분배
이러한 방식으로 발전하면, 현재 설계한 구조는 단순한 전력 분산 로직을 넘어 사용자 상태, 시스템 제약, 외부 시스템의 실시간 이벤트를 통합하는 지능형 충전 제어 플랫폼의 기술적 기반으로 작동할 수 있습니다.
나가는 말
물론 이 구조는 아직 완결된 형태는 아닙니다. ISO 15118 기반의 차량-충전기 간 양방향 협상, AI 기반의 예측 스케줄링, 그리고 DR 시스템과의 정교한 통합은 앞으로 지속적으로 다듬고 확장해가야 할 영역입니다.
하지만, 앞서 제안한 방식은 OCPP 1.6이라는 제한된 프로토콜 위에서도, 충전기의 능동적 제어와 상위 시스템의 정책 연동을 결합해 계약전력, 충전기 동시 운용, 사용자 요구, DR 이벤트 등 복합적인 조건에 대응할 수 있는 현장 중심의 실질적인 해법을 제시합니다. 현장에서 스마트한 에너지 운용이 필요하다면 지금 이 구조는 기술적으로 실현 가능한 가장 현실적인 선택지 중 하나일 것입니다.